
On the 14th of November we hosted our second annual open house event where attendees were invited to the Jubilee Conference Centre on the University of Nottingham Jubilee Campus to watch presentations and interact with demonstrations of TPR’s solutions.
The morning paid particular attention to robot integration with a focus on high accuracy robotic applications. Alex kicked off the day with a presentation outlining TPR’s product portfolio along with a brief outline on the background of the company and how TPR has become what it is today.
The next part of the morning was Roger focusing on adaptive robot control (ARC) and in particular how ‘ARC’ is useful for a manufacturer needing high precision. TPR’s product ARC is a patented high precision live optical guidance system to ensure any standard industrial robot is positioned within 0.1mm of its nominal programmed position (as defined in any CADCAM system). This differs to off-line calibrated robots or open-loop predictive algorithms, which have much wider tolerances.
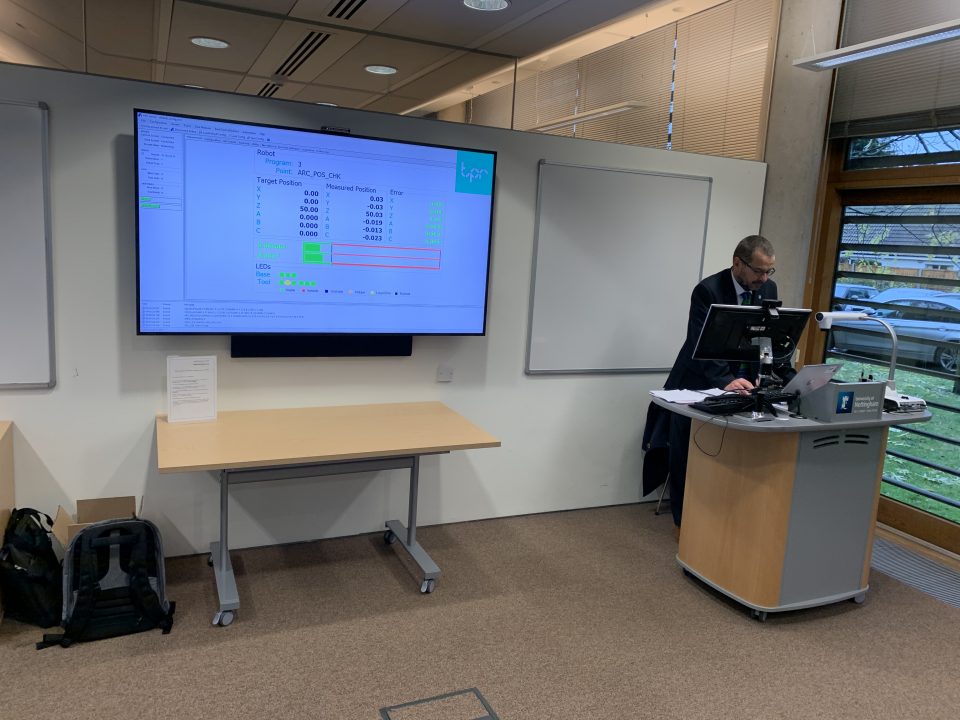
A brief demonstration showcasing ARC’s capabilities was performed by Simon giving the applicants of the open day a look first-hand how ARC+ (ARC “plus” machine learning with the target True Position tolerance being +/-0.127mm) could work for them. ARC+ includes extra infomatics including SPC. This is using an integrated Prolink QC-Calc Real Time interface.

The morning also contained an introduction from Roger into the needs of creating robot programs, from CAD, to successfully and seamlessly transfer from virtual world into production. This is illustrated with a simple off-line robot program, created in Process Simulate (from Siemens), to a KUKA robot.
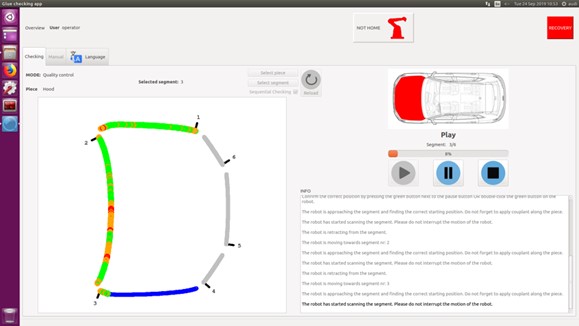
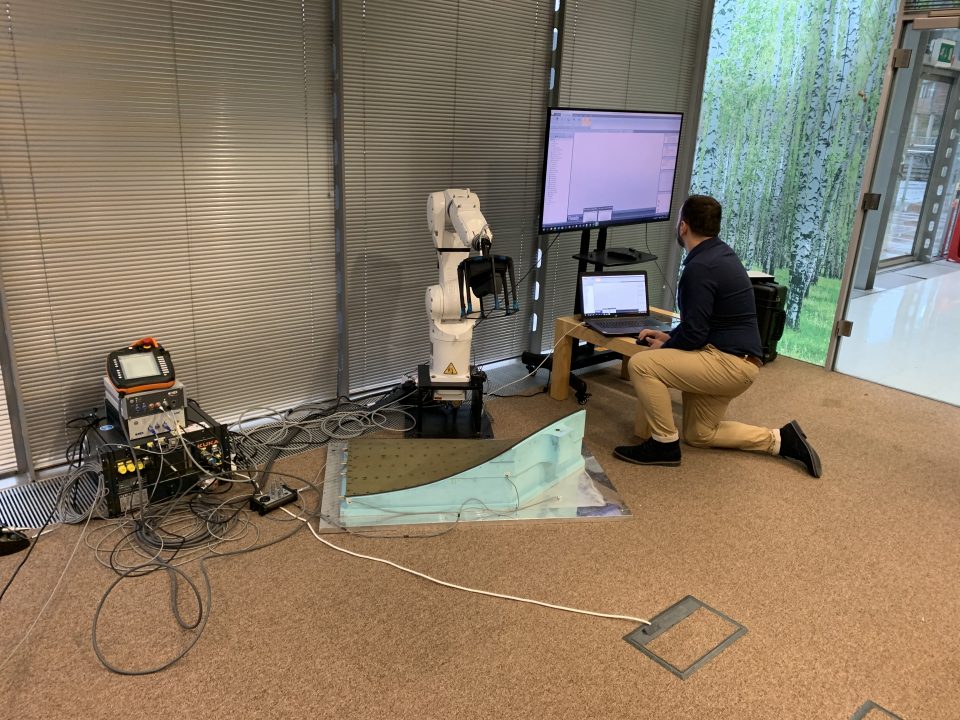
Roger also gave an insight into some of the integration projects TPR are involved in with our partners such as the collaboration with Belgian company FRS Robotics. FRS have developed a unique type of adaptive robot control for ultrasonic inspection of sheet metal “Body In White” (BIW) closure panels. Using a KUKA collaborative robot, the system “finds” the panel using force feedback sensors in the robot arm. This saves on complexity of the tooling, and as it’s a collaborative robot – no guarding is required as its completely safe to work side-by-side the operators (which Jonny demonstrated in the afternoon).
The afternoon began with a focus on inspection, with an overview of our solutions and the particular applications its designed for. This was outlined by a presentation from Alex explaining just how much the 3D laser scanning market is forecasted to grow not just globally but in particular the U.K and Europe. This led on to an insight into the 3D inspection solutions TPR have on offer which can be robotic or manual.

The afternoon showcased TPR’s own robot inspection solution “air” (automated inspection and reporting); with a demo on KUKA KR10 from Simon. This was performed on an aerospace assembly, inspecting holes, countersinks and form. The unique design of the scanner housing and fully automated integration has all been done in-house at True Position Robotics. The sensor is the latest blue light laser scanner from Nikon Metrology (H120) and the reporting/analysis software “Focus” is also from Nikon Metrology, used to get the maximum capabilities from the sensor. This is all combined with an NDI Pro CMM optical tracker and you can see it all in action in this short YouTube clip here.
Along with the demonstration into robotic inspection Amanda also presented a manual inspection solution – the ScanTRAK II from NDI. This is particularly useful in low volume applications, including Pilot Plants, and for parts larger than a desktop (multi-cameras can greatly enhance measurement volume). The session was interactive, where participants were encouraged to capture the data themselves. This was on an automotive sheet metal assembly, inspecting features and form and instead of a robot performing the scanning the H120 from Nikon Metrology is attached to the NDI ScanTRAK II.
Another interactive demo showcased the IIWA co-bot from our partners KUKA which was mounted on a portable (Flex-fellow) base. The capabilities of the co-bot were highlighted by Jonny who encouraged participants to engage with the co-bot which showed how useful the robot could be if integrated into a working environment due to its capability of working alongside workers on a production line.

The day concluded with external presentation by Ingobert Schmadel from Inora/Ellipsoid Analytics in the USA. We are using their technology for product development /analysis / verification. The technology is used in a range of industries/applications from machine tool/CMM calibration/verification to data mining. The presentation was very insightful, and we thank Ingobert for coming over and presenting for us and the applicants present.
For any questions feel free to email alex@tpr.solutions.