Introduction
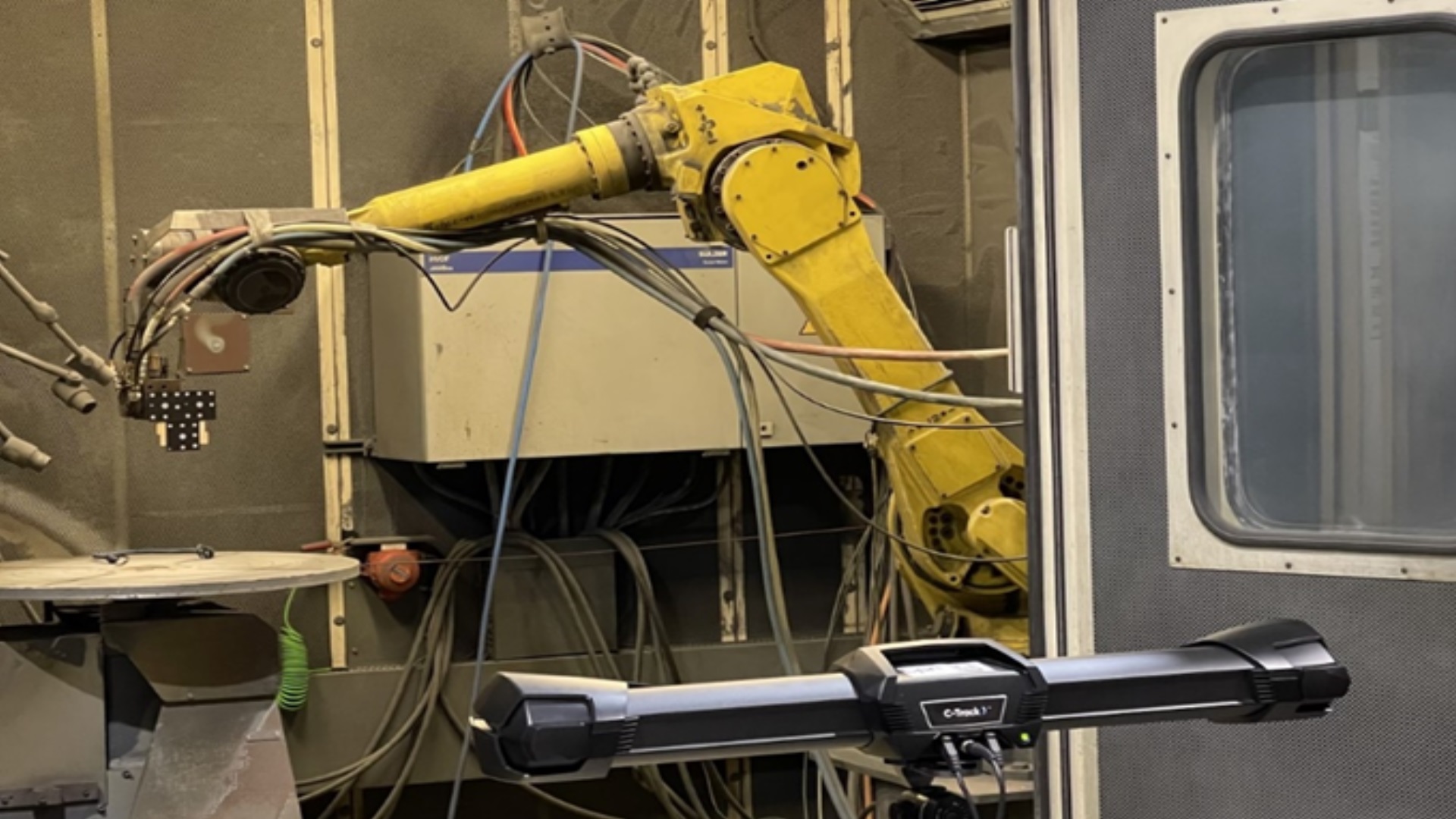
A customer kindly let us show this picture, from a robot measurement task TPR performed this week. Our team have been working in this space since the mid ‘90’s and it prompted a discussion as to why this sector has never really taken off. This blog tries to re-kindle this debate with some ideas on how adoption can increase.
What issue are we trying to solve, and why?
The customer in this image has a specific process that needs to be controlled as part of their ISO 9000 Quality Process. The robot needs to perform within a certain positional tolerance and velocity to ensure that process. This is not a high accuracy application, merely confirming that the process is properly controlled, within the normal capability of the standard robot.
They are not the only robot user with such a need – so why is it so rare to manage this process?
The more usual control method is to measure the product that comes out of the robot cell. This keeps the robot cell producing, and “sample” inspection performed elsewhere. The risk is “scrap” or “rework costs”. But more generally those would be attributed to the process tools, not specifically the robot. So, the first issue is the cost of the robot getting it wrong. In the above example, the parts produced are really expensive, and product measurement not easy in production, or when in-use. The principal process failure would be if the robot was in the wrong place or processing at an incorrect speed.
This activity confirms the robot is performing correctly, and there is confidence in the on-going production process. Measurement results would normally be a simple warning that the process is starting to move to tolerance limit, and a service intervention required.
How?
The two metrics required are “position” and “velocity”. To independently assess that, we use an external metrology system. This is running at an order of magnitude higher accuracy than the robot. TPR use the Creaform C-Track optical tracker. This has the advantage of measuring multiple frames simultaneously, So, in this case, the robot tool (in 6D) with respect to a turntable (again, in 6D).
The velocity is measured based on the measurement frequency of the instrument – in this case up to 80Hz, which is perfect for the 100mms-1 -> 200mms-1 process speeds in this application. So, taking a dynamic 6D measurement approximately every two millimetres.
The metrology system must be capable of measuring the robot in its full operating volume. This is typically 1m3. If higher volumes are required the camera is capable up to 17m3, but more normally multiple cameras are used – especially to maintain line-of-sight. In more challenging robot cell topography, a robot simulation can be performed in advance to pre-qualify the inspection. But this application, its very straight forward, requiring only a couple of hours intervention time, once a year.
The software is a mix of Creaform and TPR, and in higher accuracy applications TPR uses its own optical tooling technology. Our partner in Belgium, C-Tech, has an extra software package if more detailed dynamic analysis is required. Collectively we can support your full ISO9000 needs.
“Substitutes” – how its normally done today?
Robots are usually programmed “on-line” using a teach pendent and hand-eye coordination. Even with “Off-Line” programs (created in CAD). Its highly usual that they will be “trimmed-in” on-line. This manual adjustment hides issues with the robot itself, in terms of its own accuracy and path following. After New Product Introduction (NPI) this iterative routine of robot process / off-line inspection / update robot program, … repeat leads to a steady state. Most normally, the robot “repeatability” in this routine is excellent – and rarely the cause of process problems. So, when quality issues arise, it’s very rare to even consider “It may be the robot” and that it may require a service intervention.
Yet for most robot users, outside the largest body construction car plants, finding a new / spare robot is not the quickest activity – forcing companies to re-start manual build (if indeed that’s possible). The second issue is when a new robot is found, both its mechanical build and re-installation will be “slightly” different. The background to “absolute accuracy robots” is that you can just swap them out within 1mm, and perhaps must do no / minimal re-touch-up. But with some robot users having longer programs (car industry typically 60 s; aerospace can be hours!), restarting a robot process with a different machine can be a real challenge (itself a separate thread TPR can support).
So, this example of a simple validation that significantly improves robotic process control management, and risk control of robotic stock. This is independent to the other process control variables in the cell, including tools, fixtures, and parts.
TPR has a range of solutions for high accuracy digital twinning and robot control. But this piece is expressly written for validation of standard robots, performing standard robot processes. For more information, please contact alex@tpr.solutions. We are interested to know if we should do more to publicise our offerings in this space, or the risk of robot performance drift to low, to consider managing this, through life.